Occupancy Network
Omnidirectional Depth-Aided Occupancy Prediction based on Cylindrical Voxel for Autonomous Driving
Problem Statement
What is vision-based Occupancy task and why we need it?

Novelties



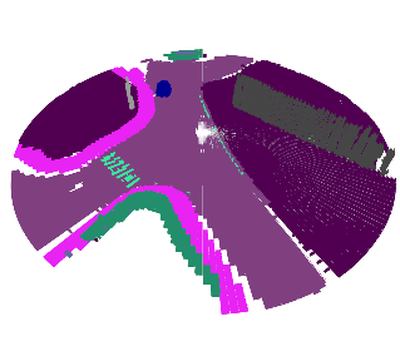
Experimental Result

Even in less voxels, we have achieved better reconstruction result, especially at close range.